
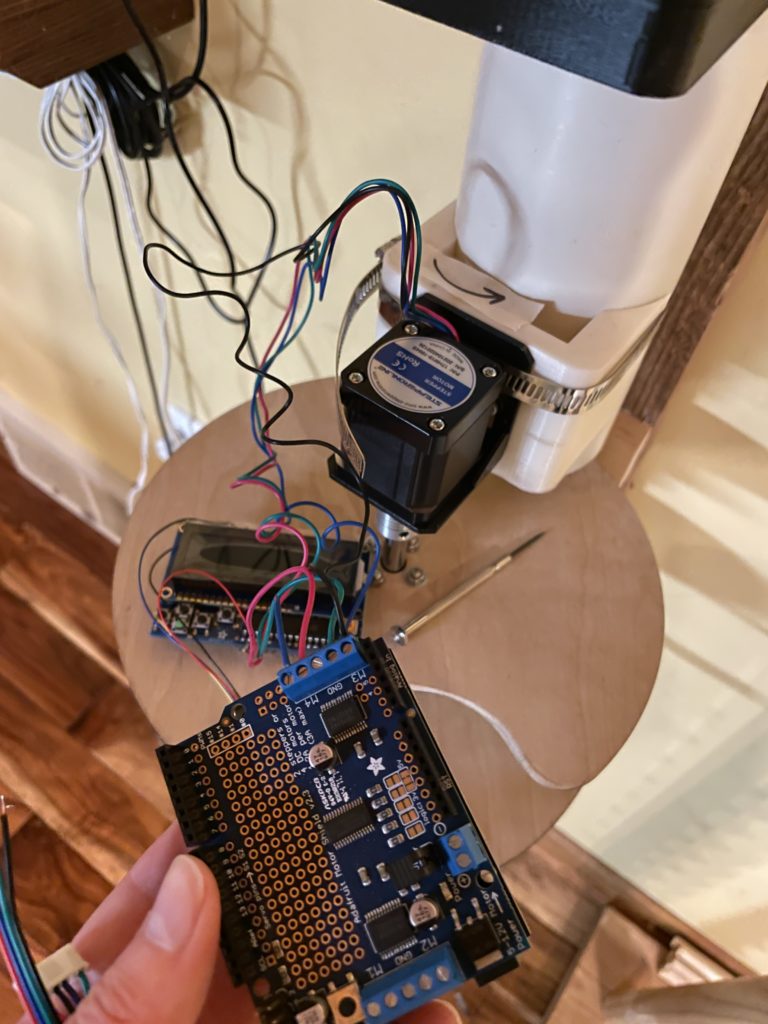
I made a robot to give my pet rabbit pellet food in an enrichment ball on a timed schedule. I managed to put this together in just a couple days.
I presented this project at the Feb 2022 Sector67 Monthly Meeting. The presentation is mainly me showing the resources on this blog post, so there is substantial content overlap.



I planed it out in Adobe Illustrator
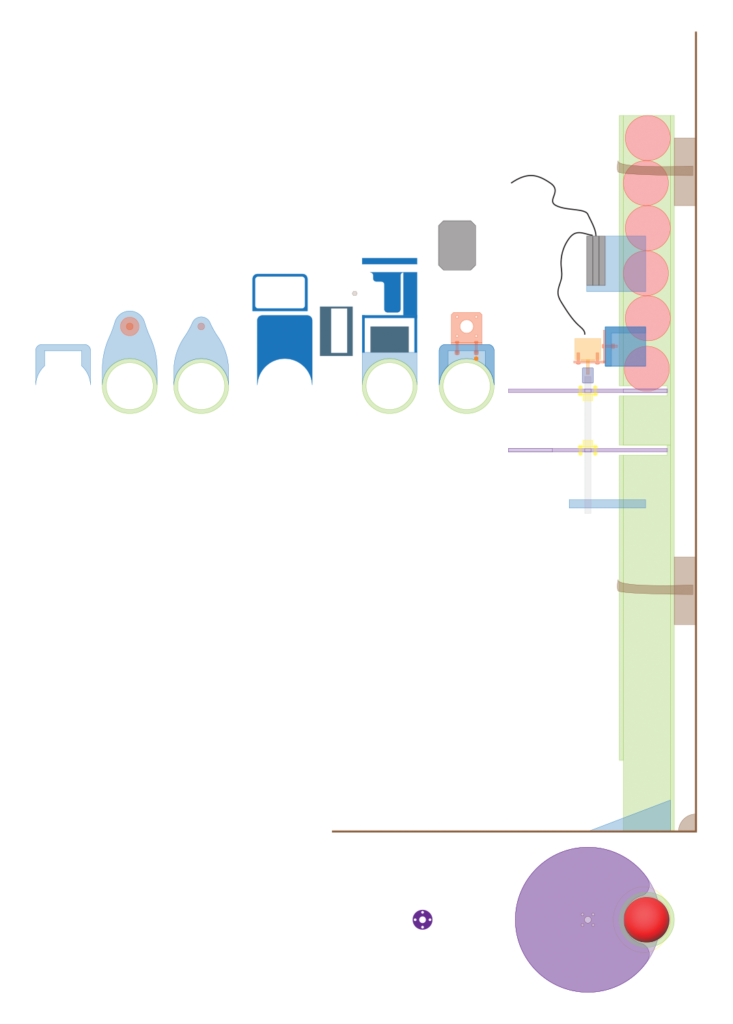
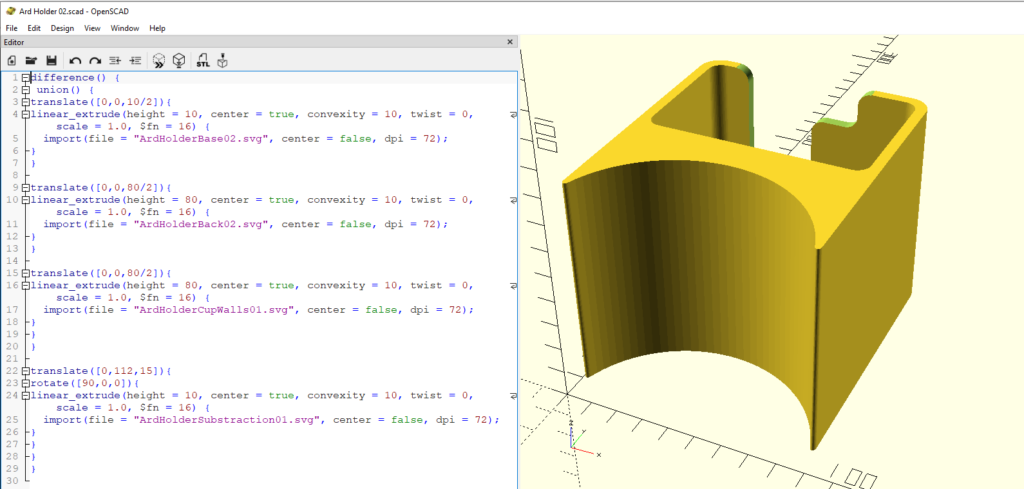
I exported SVGs from Adobe Illustrator and made them 3D in OpenScad before 3D printing them at Sector67. I also laser cut the 2 wooden disks at Sector67. I think the warped wooden disks are the weakest part of this robot, and thinner, flatter, metal disks would be a nice improvement. Although, it does work pretty well in it's current confirmation.
Parts List
- Food dispensing balls for rabbits
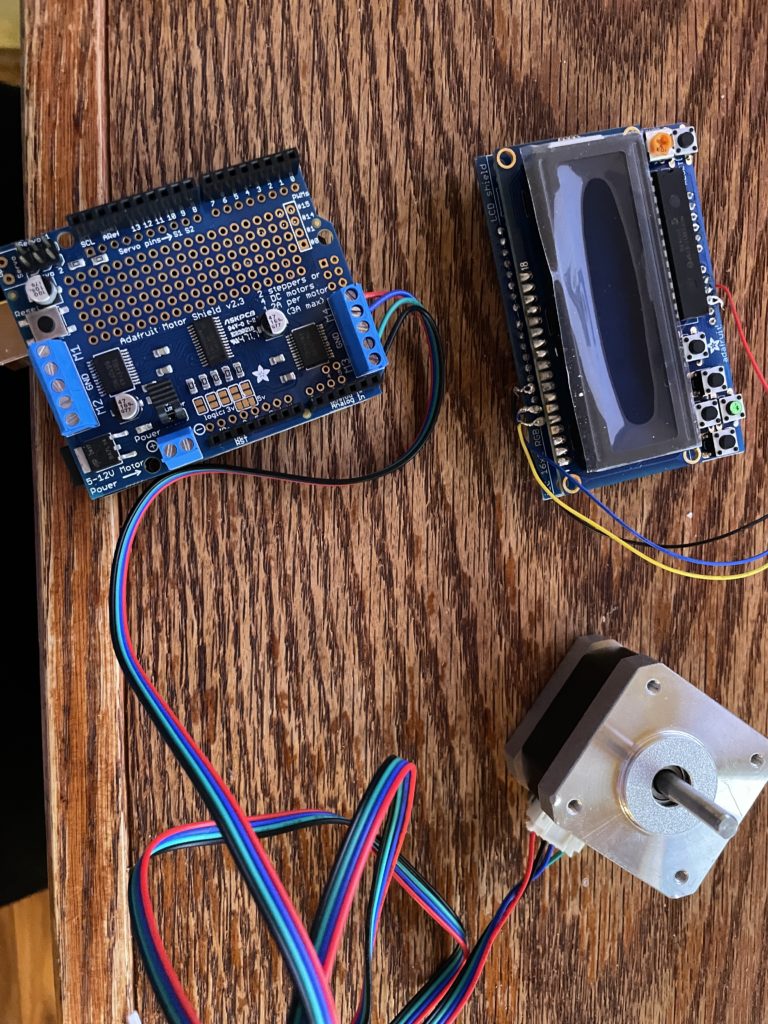
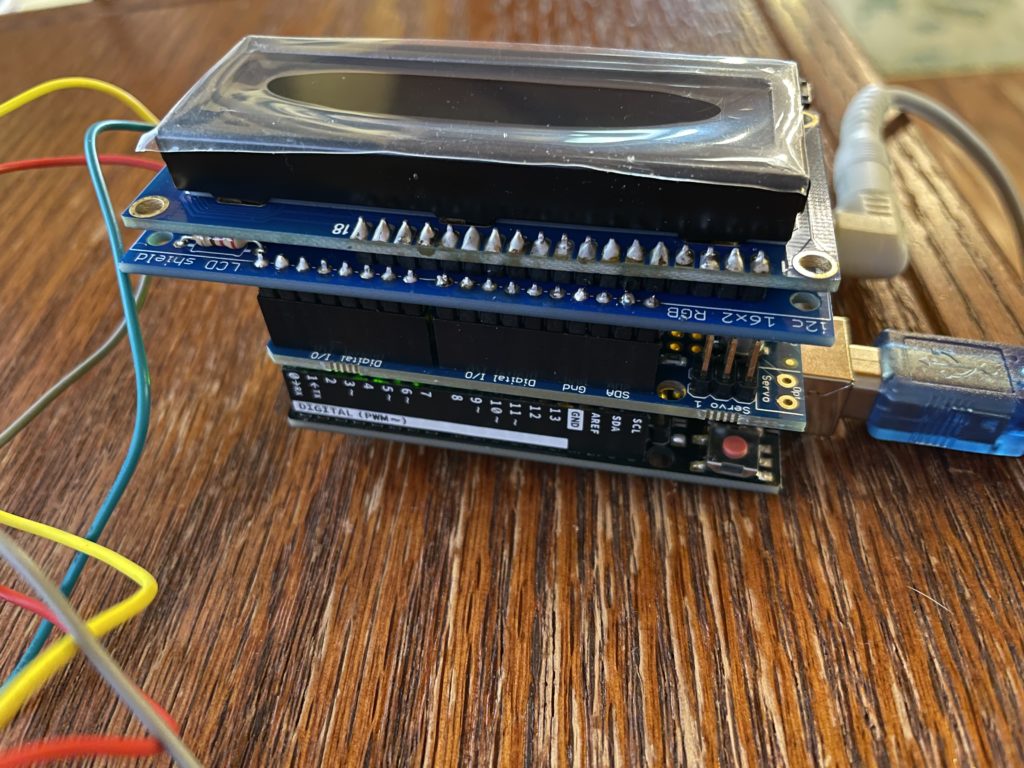
- Arduino Computer
- Stepper Motor (Nema 17 4.0V 1.2A 1.8° Bipolar)
- Motor Shield
- Real Time Clock - PCF8523 with Breakout Board - STEMMA QT (I kind of wish I got the more accurate one, this one looses ~15 secs a day, which really adds up.)
- LCD screen with buttons
- Shaft to disk connectors
- 10mm diameter, 200mm shaft
- Ball Bearing with 10mm inside diameter
- 12V 2A Power Supply Adapter
- Barrel connector (because the motor power supply is wired in)
- Shield stacking headers
- Aluminum Flex Shaft Coupler - 5mm to 10mm
- Nema17 motor mounting bracket
- 4-pin to Male Headers Cable - 150mm Long (for plugging into Real Time Clock)
- Coin battery for real time clock
- USB Power Supply cable
- PVC Pipe
- Pipe mounting straps
- Spare lumber to hold it upright
Program
I put this program together using various tutorials and a lot of copy and pasting.
Thank you to Becka L, Chris M, and Brian V for their help!